DINGSは、リニアアクチュエータおよび一般的なロータリーステッパー向けに、フィードバック要件を備えたアプリケーション設計を可能にする幅広いエンコーダを提供します。
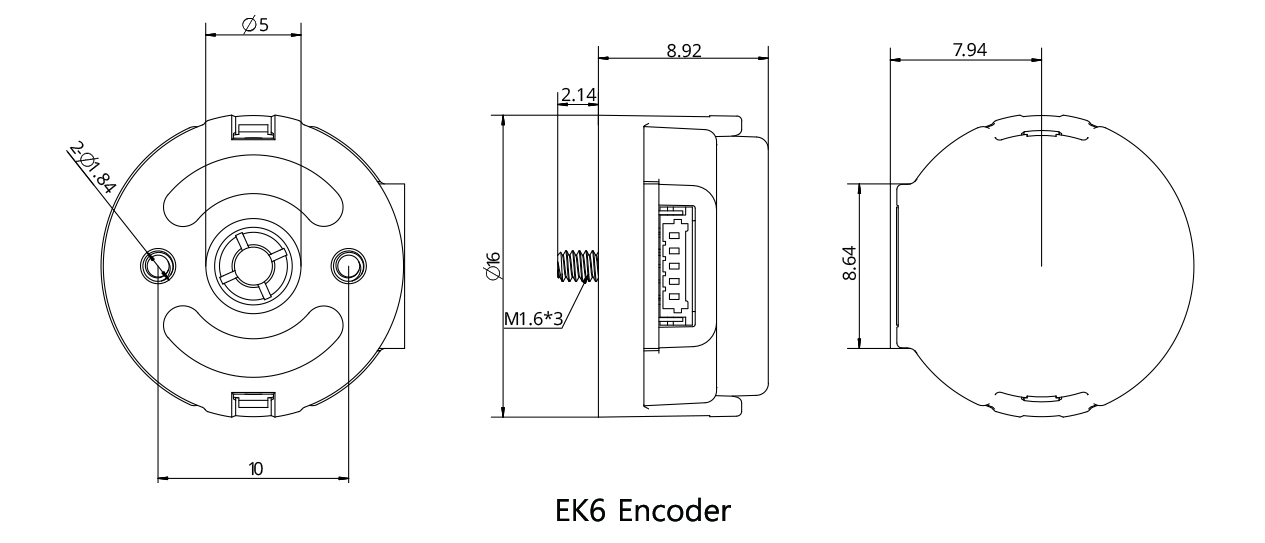
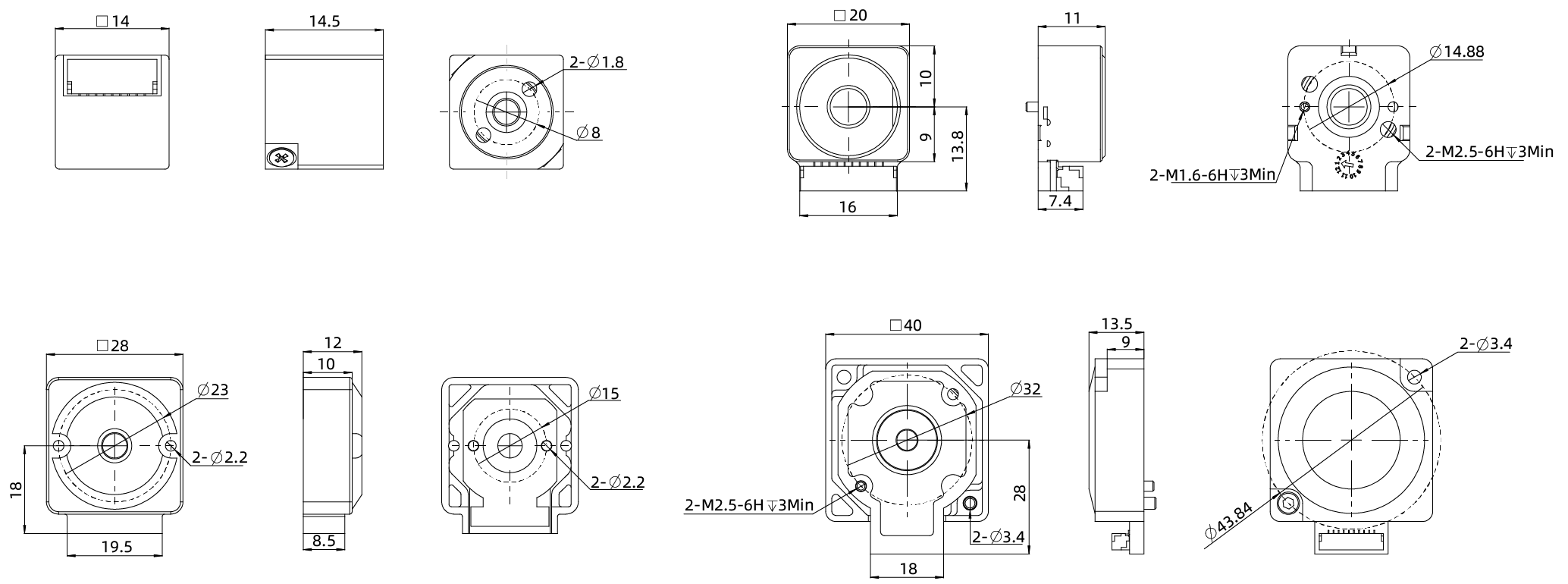
モーターの各異なるサイズに応じて、DINGSはEK1からEK7シリーズまでの5種類のさまざまなサイズと解像度のエンコーダを提供しています。
アプリケーション要件に応じて、インデックス出力または非インデックスタイプ、およびシングルエンドまたは差動出力としての出力方法を簡単に選択できます。
また、さまざまな解像度を自由に選択でき、より簡単で正確な位置決めが可能です。
DINGSのすべての標準エンコーダは光学式で増分タイプです。エンコーダを選択する際には、特にサイズ、解像度、インデックス、および出力方法のオプションを注意深く確認してください。

モバイル環境では、左右にスクロールして内容(テーブル)を見ることができます。
| 製品タイプ | モータタイプ | エンコーダ | |
|---|---|---|---|
| ステッピング送りねじリニアアクチュエータ | External | 6E | EK6, EK7 |
| 8E | EK1, EK7 | ||
| 11E | EK1, EK7 | ||
| 14E | EK1, EK2, EK7 | ||
| 17E | EK1, EK2, EK7 | ||
| 23E | EK2, EK3, EK7 | ||
| 24E | EK2, EK3, EK7 | ||
| 34E | EK3 | ||
| Non-Captive | 6N | EK6, EK7 | 8N | EK1, EK7 |
| 11N | EK1, EK7 | ||
| 14N | EK1, EK2, EK7 | ||
| 17N | EK1, EK2, EK7 | ||
| 23N | EK2, EK3, EK7 | ||
| 24N | EK2, EK3, EK7 | ||
| 34N | EK3 | ||
| Captive | 8C | EK1 | |
| 11C | EK1 | ||
| 14C | EK1, EK2 | ||
| 17C | EK1, EK2 | ||
| 23C | EK2, EK3 | ||
| 24C | EK2, EK3 | ||
| Kaptive | 6K | EK6 | 8K | EK1 |
| 11K | EK1 | ||
| 14K | EK1, EK2 | ||
| 17K | EK1, EK2 | ||
| 23K | EK2, EK3 | ||
| 24K | EK2, EK3 | ||
| DLG シリーズ | DLG 28 | EK1 | |
| DLG 42 | EK1, EK2 | ||
| 中空軸ステッピングモータ | 6HS | EK6, EK7 | 8HS | EK1, EK7 |
| 11HS | EK1, EK7 | ||
| 14HS | EK1, EK2, EK7 | ||
| 17HS | EK1, EK2, EK7 | ||
| 23HS | EK2, EK3, EK7 | ||
| 24HS | EK2, EK3, EK7 | ||
| 34HS | EK3 | ||
| ハイブリッドロータリーステッピングモータ | 6H | EK6, EK7 | |
| 8H | EK1, EK7 | ||
| 11H | EK1, EK7 | ||
| 14H | EK1, EK2, EK7 | ||
| 17H | EK1, EK2, EK7 | ||
| 23H | EK2, EK3, EK7 | ||
| 24H | EK2, EK3, EK7 | ||
| 34H | EK3 | ||
モバイル環境では、左右にスクロールして内容(テーブル)を確認できます。
| 分解能(CPR) | 100 | 108 | 120 | 125 | 128 | 200 | 250 | 256 | 300 | 360 | 400 | 500 | 1000 | 512 | 720 | 800 |
| Single ended output | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| Differential output | A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P |

In a mobile environment, you can move left and right to see the contents (tables).
| 分解能(CPR) | 50 | 100 | 192 | 200 | 250 | 256 | 360 | 400 | 500 | 720 | 900 | 1000 | 1250 | 2000 | 2500 | 4000 | 5000 |
| Single ended output | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | ||||
| Differential output | A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q |

In a mobile environment, you can move left and right to see the contents (tables).
| 分解能(CPR) | 64 | 100 | 200 | 500 | 1000 | 1800 | 2000 | 2500 | 3600 | 4000 | 5000 | 7200 | 8000 | 10000 |
| Single ended output | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |||||
| Differential output | A | B | C | D | E | F | G | H | I | J | K | L | M |

In a mobile environment, you can move left and right to see the contents (tables).
| 分解能(CPR) | 250 | 256 | 500 | 512 | 1000 | 1024 | 2000 | 2048 | 4000 | 4096 |
| Single ended output | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |

In a mobile environment, you can move left and right to see the contents (tables).
| 分解能(CPR) | 1000 | 2000 | ||||||||
| Single ended output | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Differential output | A | B | C | D | E | F | G | H | I | J |