リードとは、スクリューが1回転したときにナットが軸方向に移動する直線距離を意味します。
リード値が大きいほど、スクリュー1回転あたりの移動距離が増加し、より高速な送り速度を実現できます。リードはピッチとスタート数の積で算出されます。
ピッチとは、隣接するねじ山間の軸方向の距離を意味します。
シングルスタートスクリューではピッチとリードは等しく、マルチスタートスクリューではリードがピッチよりも大きくなります。マルチスタート構造は、より高い送り効率と滑らかな動力伝達特性を提供します。
ねじ精度とは、特定の基準長さ内における理論的な移動距離と実際の移動距離の間に生じる累積誤差を意味します。
例:リード精度が0.004 inch/footのスクリューは、1 foot移動時に実際の位置が理論値に対して最大±0.004 inchの誤差が生じる場合があります。
リードスクリューの精度は、システムの位置決め精度および繰り返し精度に直接影響を与える重要な要素です。
垂直設置環境では、モーターの電源が遮断された場合やブレーキがない場合、逆運転(Backdriving)が発生する可能性があります。
また、重力による追加荷重を考慮してシステムを設計する必要があります。
ハイブリッドステッピングモーターの共振は、一般的に約200PPS付近で発生します。マイクロステップ駆動は、この領域における振動およびノイズを低減するのに効果的です。
ステッピングモーターを駆動するためには外部ドライブが必要です。市販のドライブ製品のほとんどには、電源部、ロジック回路、スイッチング回路、およびパルス制御機能が含まれています。
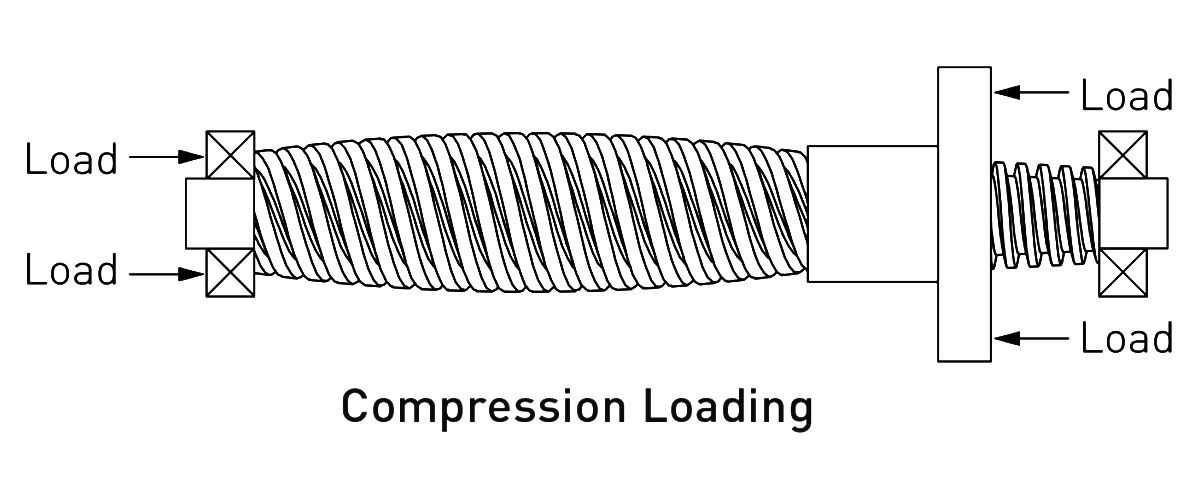
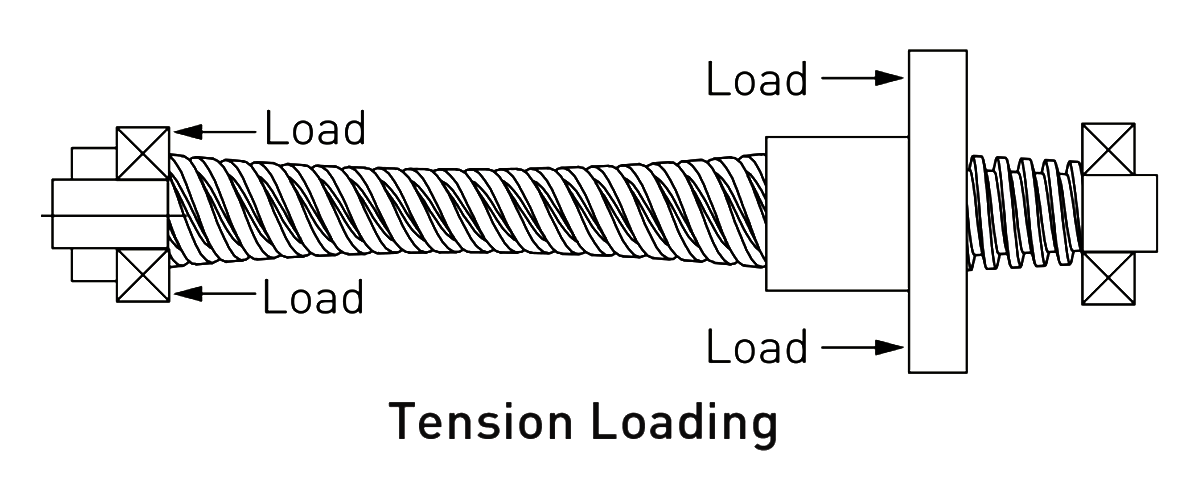
スクリューを引き伸ばす方向に作用する荷重を引張荷重(Tension Load)といいます。反対にスクリューを圧縮する方向に作用する荷重を圧縮荷重(Compression Load)といいます。
これらの荷重条件は負荷の大きさによって異なり、圧縮荷重条件では座屈荷重(Column Loading)に対するスクリューの軸方向強度を考慮して設計する必要があります。
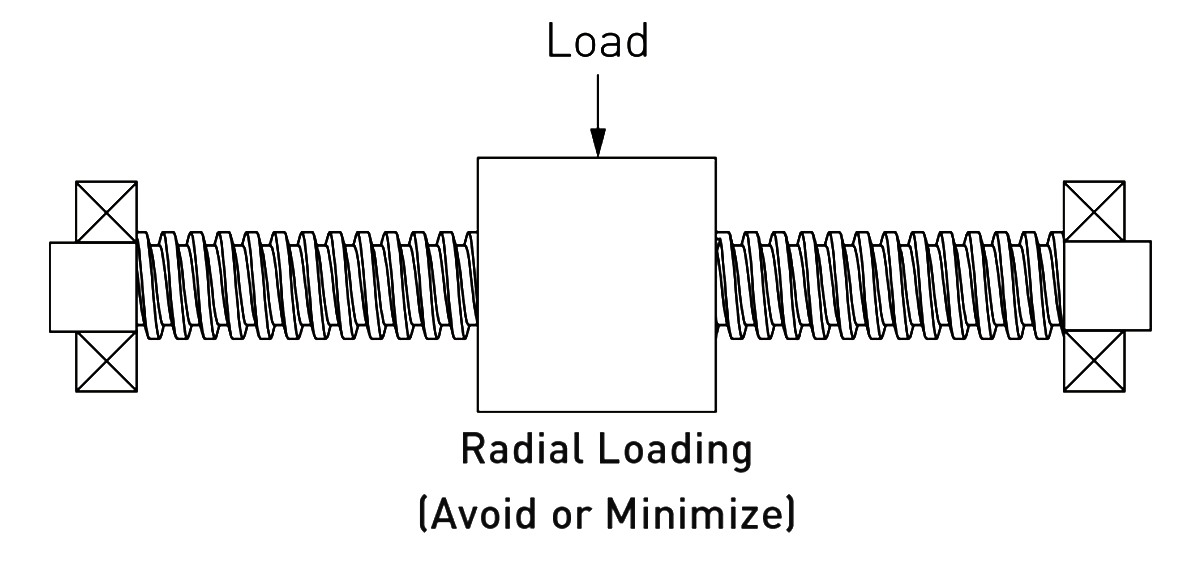
ラジアル荷重とは、スクリュー軸に対して垂直方向に加わる荷重を意味します。
リニアガイドなどの追加的な機構支持なしに使用することは推奨されません。
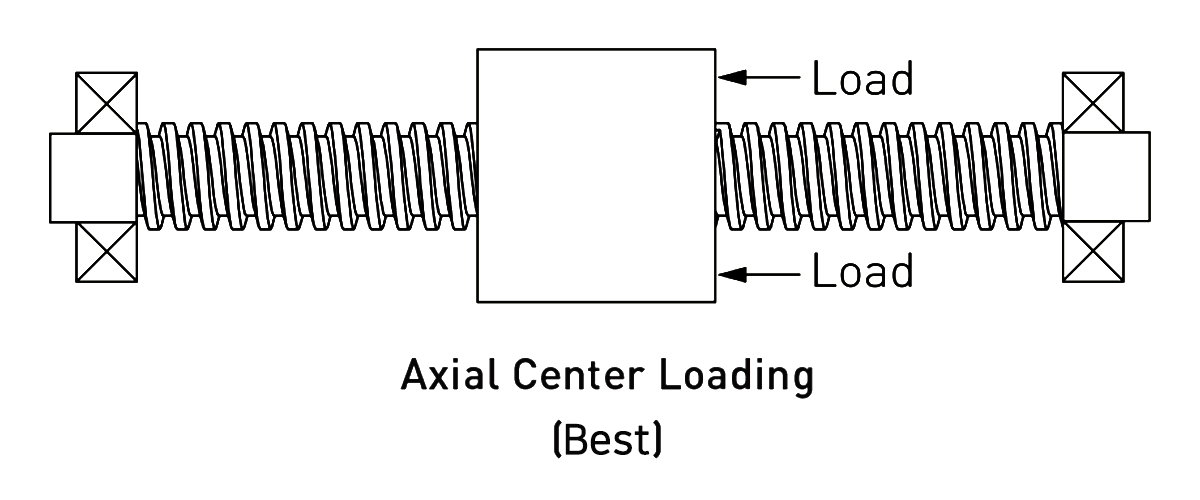
リードスクリューの中心線方向に加わる荷重を意味します。
逆運転(Backdriving)とは、軸方向荷重によってスクリューまたはナットが反対方向へ回転する現象を意味します。
一般的に効率が50%以上のリードスクリューはBackdrivingが発生しやすく、35%以下の効率を持つリードスクリューはこの現象を抑制するのに効果的です。また、リードが小さいほどBackdrivingおよび空回りの可能性を低減でき、垂直方向システムでは重力によりBackdrivingがより発生しやすくなります。
リードスクリューを駆動するために必要なモータートルクは、以下の要素の合計で構成されます:
標準メートル法およびインチ規格の端部加工オプションを提供しています。
お客様の要件に応じたカスタム端部加工にも対応しておりますので、必要な場合はDINGS'までお問い合わせください。
スクリューシステムの性能(速度および効率)は、スクリュー端部の固定および支持方式によって影響を受ける場合があります。
| 固定タイプ | 相対的な剛性 | 臨界速度係数 | 臨界ロッド係数 |
|---|---|---|---|
 |
低剛性 | 0.32 | 0.25 |
 |
剛性 | 1.0 | 1.0 |
 |
高剛性 | 1.55 | 2.0 |
 |
最高剛性 | 2.24 | 4.0 |
臨界速度とは、スクリューのたわみまたは欠陥によって最初の共振領域に達する回転速度を意味します。この速度領域ではシステムの振動および不安定現象が発生する場合があります。
臨界速度は以下の要素によって影響を受けます:
例として、直径19.05 mm(0.75 inch)、長さ1778 mm(70 inch)のスクリューは、安全係数K=1.25の条件においてFS=0.32基準で約187 RPMの臨界速度を持ちます。
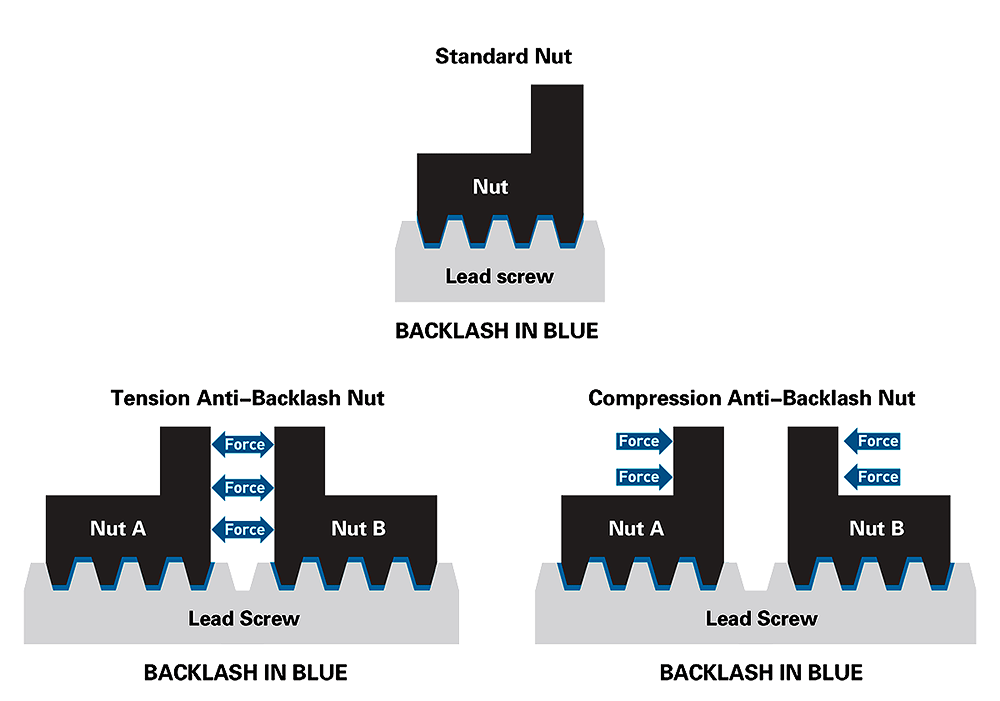
バックラッシュとは、スクリューとナット間に生じる相対的な軸方向のがたつきを意味します。
一般的に使用時間が増加するにつれてバックラッシュも増大します。バックラッシュの補正はアンチバックラッシュナットを使用することで最小限に抑えることができ、バックラッシュは双方向の位置決め精度に影響を与えます。